推荐厂家
暂无
暂无




 400-860-5168转6117
400-860-5168转6117
 留言咨询
留言咨询
 400-860-5168转2471
留言咨询
400-860-5168转2471
留言咨询
 400-860-5168转2471
留言咨询
400-860-5168转2471
留言咨询



MILS-F31迷你型激光雷达采用时间飞行(TOF)测距原理,结合了光学、电学机械运动学等多学科领域前沿技术,MILS-F31能够实现270°视场角、8米范围内的±3cm的准确测量。MILS-F31是一款工业级别的扫描式迷你型激光雷达,内嵌成熟的避障算法,支持16个区域组的避障设置,可广泛应用于AGV、机器人的避障场合。激光防护等级1级,人眼安全 大视场、准确测量、避障区域可灵活设置 准确温控设计,工作温度范围- 25℃~ + 50℃ 抗强光,性光路设计、多级滤光处理 体积小巧,易装配,适用于多种AGV机型。[img=,690,460]https://ng1.17img.cn/bbsfiles/images/2023/06/202306140951318838_9210_5922841_3.jpg!w690x460.jpg[/img]
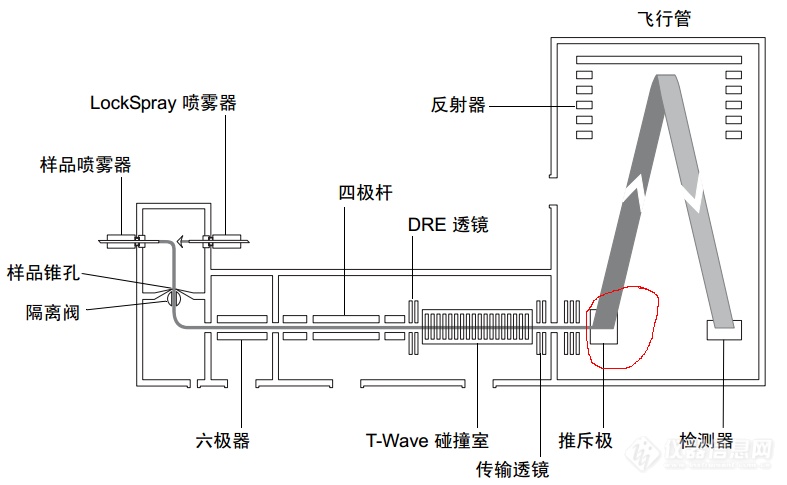
[img=,787,485]https://ng1.17img.cn/bbsfiles/images/2019/02/201902261801102055_3102_2493286_3.png!w787x485.jpg[/img]离子怎么停下来,改变方向后进入飞行管的?这个过程效率低吗?飞行管中所有离子的飞行路径和运动轨迹是一样的吗?
《分析电子显微学导论》作者:戎咏华 王晓东 黄宝旭 李 伟出版社:高等教育出版社 分析电子显微学是揭示材料介观和微观世界的有力工具,它能对材料显微组织的形貌、结构、成分进行三位一体的原位分析,是材料研究的重要现代技术之一。本书是材料科学与工程专业硕士生的课程教材。全书共分六章,内容包括分析电子显微镜的构造及其功能,样品的制备方法,电子衍射花样的特征和标定方法,晶体衍射中的数学处理,电子衍射衬度运动学和动力学理论及其应用,高分辨和高空间分析电子显微术的原理和应用以及分析电子显微学的进展。 本教材是掌握分析电子显微术原理和应用的入门书,故注重基本的物理概念和相关的数学推导,并附许多实例和思考题、练习题以便读者理解和掌握重点。本书配有电子课件和练习答案的光盘,便于教师授课。本教材也可作为正在从事该领域学习和研究的科技人员的参考书。如有需要该书的课件,可以留下邮箱,发给大家共享!![em31]









 我要推广仪器
我要推广仪器
 下载APP
下载APP