推荐厂家
暂无
暂无




【序号】:1【作者】: 陈荣虎常广涛李若欣【题名】:自愈合材料与柔性传感器的发展趋势研究【期刊】:丝网印刷. 【年、卷、期、起止页码】:2023(05)【全文链接】:https://kns.cnki.net/kcms2/article/abstract?v=3uoqIhG8C44YLTlOAiTRKibYlV5Vjs7ioT0BO4yQ4m_mOgeS2ml3UKMzGm9vnlI4zXhKfmiDPhE_x8G0H14gfmy7gpRy9DqU&uniplatform=NZKPT
传感器类型多样,用途很广,但是能运用仿生学到传感器上的一种传感器或许很多人都不清楚!仿生传感器,是一种采用新的检测原理的新型传感器,它采用固定化的细胞、酶或者其他生物活性物质与换能器相配合组成传感器。这种传感器是近年来生物医学和电子学、工程学相互渗透而发展起来的一种新型的信息技术。这种传感器的特点是性能好、寿命长。在仿生传感器中,比较常用的是生体模拟的传感器。这种传感器目前是运用最广泛的仿生传感器。
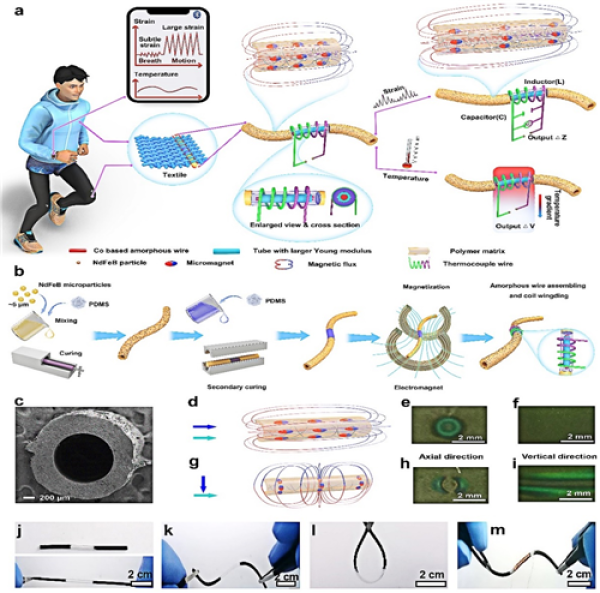
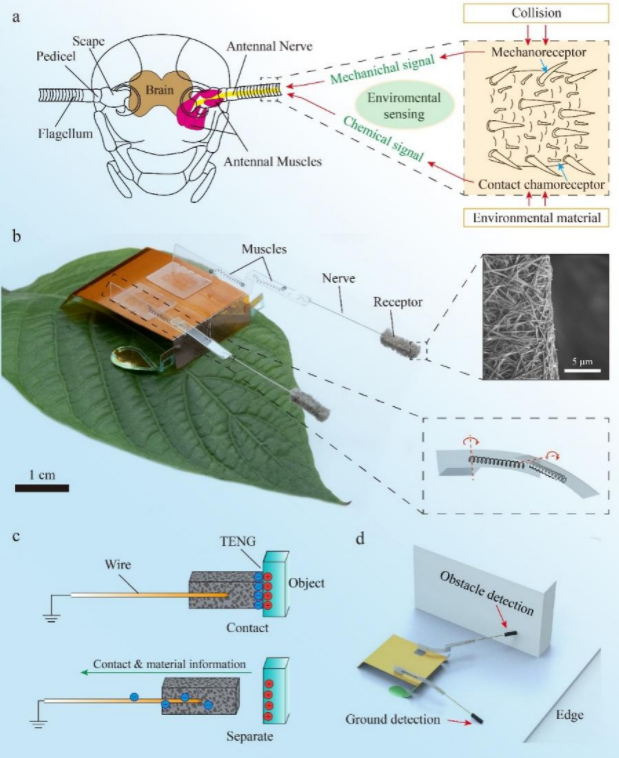
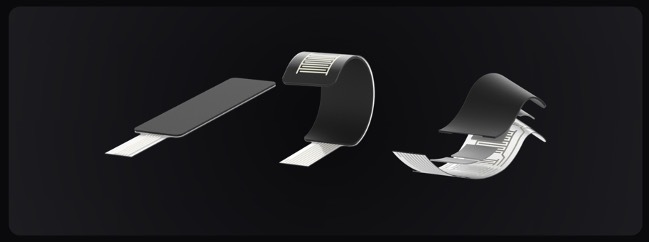
[color=#000000]近日,大连化物所催化基础国家重点实验室热电材料与器件研究组(525组)姜鹏研究员、陆晓伟副研究员、包信和院士团队开发了柔性、可穿戴长波红外光热电探测器,并将其用于电子皮肤非接触温度感知。[/color][color=#000000]仿生触觉是智能机器人感知外部环境刺激的基础。在传统触觉系统中,触觉传感器需要与外部环境物理接触进而获取温度信息,无法在接触前对外部刺激作出预判。因此,发展具有非接触温度感知能力的先进触觉传感技术,将有助于为机器人交互感知领域带来全新的体验。[/color][align=center][img]https://img1.17img.cn/17img/images/202404/uepic/d9f98d30-33d3-4a5f-ae64-7284b6ef766d.jpg[/img][/align][color=#000000]光热电探测器是基于光热、热电两个能量转换过程,可在无需制冷、无需偏置电压、无接触的条件下实现对长波红外辐射(8至14μm)的灵敏探测。本工作中,研究团队在前期光热电探测器工作([/color][url=https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.202204355][i][b]Adv. [/b][/i][/url][url=https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.202204355][i][b]M [/b][/i][/url][url=https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.202204355][i][b][color=#0070c0]ater. [/color][color=#0070c0][/color][/b][/i][/url][color=#000000],2022;[/color][url=https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.201902044][i][b]Adv. Mater [/b][/i][/url][color=#0070c0][i][b].[/b][/i][/color][color=#000000],2019;[/color][url=https://www.nature.com/articles/s41467-018-07860-0][i][b]Nat. Commun. [/b][/i][/url][color=#000000],2019)的基础上,在具有长波红外吸收能力的柔性聚酰亚胺(PI)衬底上构建了Te/CuTe热电异质结,制备出高灵敏度、柔性、可穿戴长波红外光热电探测器。Te/CuTe热电异质结一方面可以提升复合薄膜的热电功率因子,起到降低器件噪音的作用;另一方面可以通过降低其光学反射损耗,并将其光学反射极小值与PI吸收峰对齐,增强光热电耦合,提升器件灵敏度。[/color][color=#000000]在非接触式温度感知测试中,当目标温度从零下50°C上升至110°C,所制备的柔性光热电探测器灵敏度均优于商业刚性热电堆,温度分辨能力可达0.05°C。以此为基础,研究团队利用该红外探测器在接近辐射源过程中响应电压的斜率变化,开发了动态温度预警系统,使得软体机械手可对热源进行预先判定。该工作为在仿生触觉系统中引入红外探测技术提供了可行的解决方案,在机器人交互感知、虚拟现实等领域具有重要的应用前景。[/color][color=#000000]相关研究成果以“[b]Touchless thermosensation enabled by flexible photothermoelectric detector for temperature prewarning function of electronic skin ”[/b]为题,发表在[b]《先进材料》[/b][i](Advanced Materials)[/i]上。上述工作得到国家自然科学基金、国家重点研发计划、辽宁省自然科学基金、大连化物所创新基金等项目的资助。(文/图 郭晓晗、陆晓伟)[/color][color=#000000]文章链接:[/color][url=https://onlinelibrary.wiley.com/doi/10.1002/adma.202313911][b]https://onlinelibrary.wiley.com/doi/10.1002/adma.202313911[/b][/url][来源: 中国科学院大连化物所][align=right][/align]
 400-860-5168转6201
400-860-5168转6201
 留言咨询
留言咨询
 400-860-5168转4543
留言咨询
400-860-5168转4543
留言咨询
 留言咨询
留言咨询










 我要推广仪器
我要推广仪器
 下载APP
下载APP