摘要:针对各种微纳卫星电热等离子体微推进器,以口袋火箭这种工作在0.1~10torr低气压范围内的微推进器为例,分析了不同工质气体和不同低气压对羽流特征所产生的影响,说明了低气压精确控制的重要性。关于推进器低气压精确控制这一技术问题,本文详细介绍了具体实施方法,进行了考核试验,试验结果证明低气压控制波动度可以达到±1%以内。最终本文对测试方法进行了优化,提出了更实用化的全量程低气压精确控制技术方案。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
一、问题的提出
近年来,随着微纳卫星(NanoSat)的快速发展,对小体积、轻质量、低成本和高效率的微推进器提出了迫切需求,由此需要开展推进器的等离子体羽流特征等物理性能的测试评价研究。等离子羽流特征会受到工质气体和环境气压的明显影响,以国外口袋火箭羽流性能测试为例分析低气压精确控制的必要性和重要性。
口袋火箭(Pocket Rocket)作为一种微纳卫星应用中的典型代表,是一种电热式射频等离子体推进器,可实现μN~mN 量级的推力。口袋火箭因其体积小且采用电容性射频放电,可在小功率条件下获得高密度等离子体射流,且重量轻、成本低、推力小、比冲大,能以阵列形式工作,特别适合配备微纳卫星和长期提供动力。
如图1所示,卧式真空仓为口袋火箭等离子体羽流特征的测试提供低气压环境。该真空仓是一个多功能低气压环境模拟试验腔体,可集成多种试验设备用于各种等离子推进器的性能测试评价。

图1 WOMBAT推进器试验装置
如图2所示,为了形成低气压环境,真空仓配备有分子泵、机械泵、电离真空计和电容压力计,真空仓能够达到0.93mPa 的基准真空度。测试中的气体工质通常采用氮气和氩气。

图2 WOMBAT推进器试验装置结构示意图
在射频电源功率和频率分别为20W和13.56MHz条件下,并在不同低气压下对口袋火箭的羽流特性进行了测试,图3是不同工质气体在不同气压下出射等离子体羽流的实验照片。其中图a为约1.5torr低压氩,图b为约4.0torr高压氩,图c为约1.0torr低压氮,图d为约7.0torr高压氮。从图中可以看出,在高气压下氮气和氩气的羽流均呈一定的锥角扩散,而低气压下均为准直射光束,但这些特征对于产生推力的影响尚不清楚,还需要进一步研究。

图3 不同工质气体和不同气压下电热等离子体微推进器膨胀羽流的数字图像
综上所述,不同工质气体和不同低气压会对羽流特征产生明显影响,口袋火箭这种微推进器工作在0.1~10torr的低气压范围内,在此范围内测试评价羽流特性就需要对低气压进行精确控制。本文将针对低气压控制,详细介绍具体实施方法,并对实施方法进行试验考核,最终对实施方法进行优化,提出了低气压全量程的精确控制技术方案。
二、低气压精确控制方法和试验考核
所谓低气压,一般是指低于1个标准大气压的绝对压力,范围为0.1~760torr,准确测量低气压目前普遍采用的是电容压力计,通常会采用10torr和1000torr两个不同量程的电容压力计来覆盖整个低气压范围的测量。通常,模拟试验装置真空仓需要通过进气和排气方式进行低气压控制,根据气流方向,一般将进气端定义为上游,真空泵排气端定义为下游。依据控制精度一般采用上游和下游两种控制模式,由此来实现不同量程(10torr和1000torr)的低气压准确控制。
如图4所示,上游模式是维持上游压力和出气口流量,通过调节进气口流量控制仓室压力。
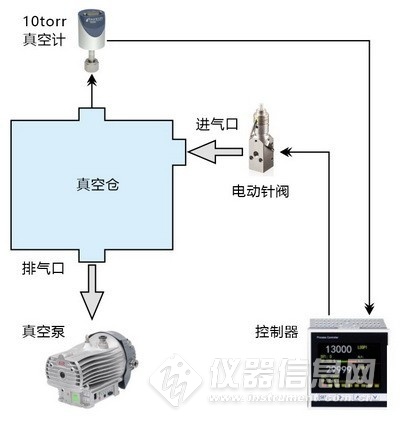
图4 低气压上游控制模式
如图5所示,下游模式是维持上游压力和进气口流量,通过调节排气口流量控制仓室压力。
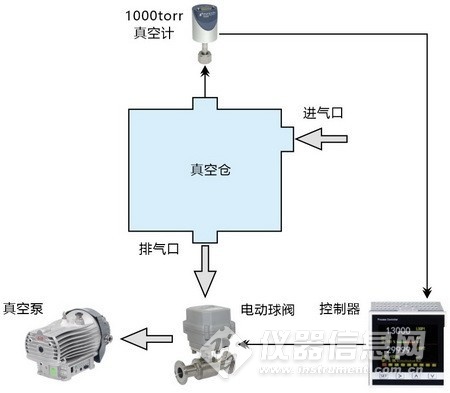
图5 低气压下游控制模式
针对上述两种控制模式,分别采用1torr和1000torr两只电容压力计和24位高精度压力控制器进行了考核试验,试验装置如图6和图7所示。

图6 低气压上游控制模式考核试验装置
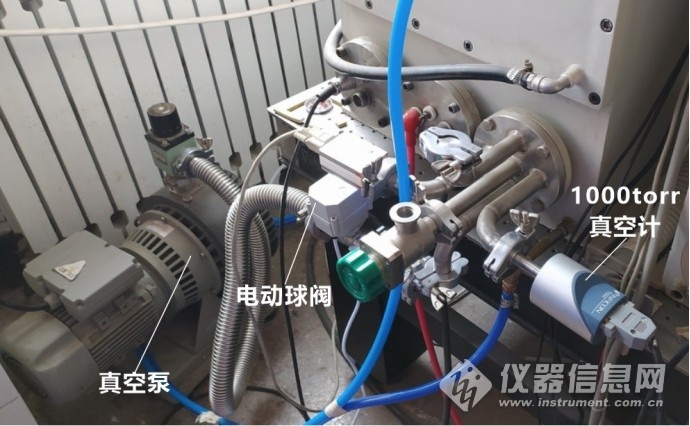
图7 低气压下游控制模式考核试验装置
在上游模式试验过程中,首先开启真空泵后使其全速抽气,然后在 68Pa 左右对控制器进行 PID参数自整定。自整定完成后,分别对 12、27、40、53、67、80、93 和 107Pa共8个设定点进行了控制,整个控制过程中的气压变化如图8所示。

图8 上游模式低气压定点控制考核试验曲线
在下游模式试验过程中,首先开启真空泵后使其全速抽气,并将进气阀调节到微量进气的位置,然后在300torr左右对控制器进行PID参数自整定。自整定完成后,分别对 70、 200、 300、450 和 600Torr 共5个设定点进行了控制,整个控制过程中的气压变化如图9 所示。

图9 下游模式低气压定点控制考核试验曲线
将上述不同低气压恒定点处的控制效果以波动率来表示,则得到图10和图11所示的整个范围内的波动率分布。从波动率分布图可以看出,在整个低气压的全量程范围内,波动率可以精确控制在±1%范围,在12Pa处出现的较大波动,是因为采用 68Pa处自整定获得的PID参数并不合理,需进行单独的PID参数自整定。

图10 上游模式低气压定点控制考核试验曲线
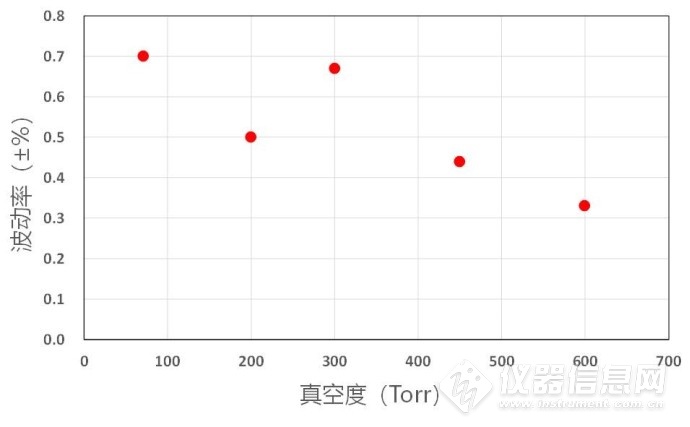
图11 下游模式低气压定点控制考核试验曲线
三、全量程低气压精确控制实施方案
从上述气压精确控制方法可以看出,可以根据实际需要选择不同的控制模式,如10torr以下的低气压控制可以选择采用上游模式,10~1000torr范围的高气压控制可以选择采用下游模式。
在大多低气压环境模拟试验设备中,特别是针对推进器性能测试需要,需要在整个低气压范围内能实现气压的精确控制,并能实现自动化,因此单独使用或切换上游和下游控制模式并不是最佳选择。
为实现低气压全量程范围内的自动化精确控制,我们对上游和下游两种模式进行了集成,提出了双向控制模式的技术方案,整体方案布局如图12所示。

图12 低气压全量程双向控制模式技术方案真空系统布局图
在低气压全量程控制过程中,需要采用两只不同测量范围的电容式真空计来进行全量程覆盖,也可以材料一直电容式真空计和一直电离式真空计覆盖更宽的低气压范围。
在双向控制模式的技术方案中,对控制器和电动阀门提出了更高要求,主要体现在以下几个方面:
(1)要求具有可同时连接两个真空传感器的能力,并可根据低气压测量值在两个真空传感器之间进行切换,实时准确的进行低气压测量和控制。
(2)控制器需要具有很高的测量精度,如24位A/D采样精度,以适应不同真空计测量精度的要求,并充分发挥真空计的测量能力。
(3)在双向控制模式中,还要求真空压力控制器具有正反向控制功能,即对上游电动针阀用反向控制,对下游电动球阀用反向控制。
(4)在双向控制模式中,负责上下游气体流量调节的电动针阀和电动球阀需要交替工作,因此这些电动阀需要具有尽可能快的响应速度,真空仓室越小,气压惰性越小,响应速度要求越快,一般要求是阀门从全闭到全开的时间为2秒以内甚至更低。
总之,通过采用上述双向模式的低气压控制方案,特别是采用了新型高性能真空压力控制器和高速电动阀门之后,可以实现低气压全量程的精确控制。
四、参考文献
[1] Corr C S, Boswell R W. Nonlinear instability dynamics in a high-density, high-beta plasma[J]. Physics of Plasmas, 2009, 16(2): 022308.
[2] Greig A, Charles C, Boswell R. Plume characteristics of an electrothermal plasma microthruster[J]. IEEE Transactions on Plasma Science, 2014, 42(10): 2728-2729.
[3] Petkovic M, Pollara R. Dual-purpose space simulation facility for plasma thruster and satellite testing[C]//28th Space Simulation Conference. 2014.
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~