我要改名
第1楼2008/11/19
二、原子力显微镜的硬件架构:
在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。

2.1 力检测部分:
在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之的范德华力。所以在本系统中是使用微小悬臂(cantilever)来检测原子之间力的变化量。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品的特性,以及操作模式的不同,而选择不同类型的探针。
2.2 位置检测部分:
在原子力显微镜(AFM)的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在cantilever的末端时,其反射光的位置也会因为cantilever摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。
2.3 反馈系统:
在原子力显微镜(AFM)的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针尖保持合适的作用力。
原子力显微镜(AFM)便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜(AFM)的系统中,使用微小悬臂(cantilever)来感测针尖与样品之间的交互作用,这作用力会使cantilever摆动,再利用激光将光照射在cantilever的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式给呈现出来。
我要改名
第2楼2008/11/19
激光检测原子力显微镜
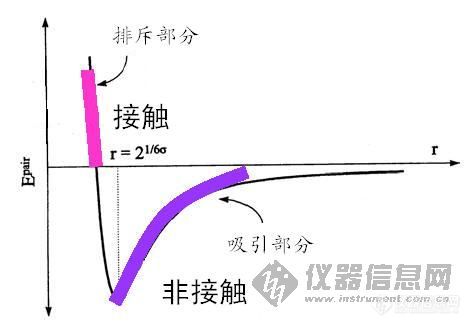
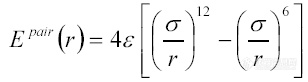
原子力显微镜的基本原理是:将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法或隧道电流检测法,可测得微悬臂对应于扫描各点的位置变化,从而可以获得样品表面形貌的信息。下面,我们以激光检测原子力显微镜(Atomic Force Microscope Employing Laser Beam Deflection for Force Detection, Laser-AFM)——扫描探针显微镜家族中最常用的一种为例,来详细说明其工作原理。 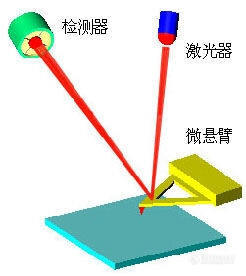
图3. 激光检测原子力显微镜探针工作示意图
如图3所示,二极管激光器(Laser Diode)发出的激光束经过光学系统聚焦在微悬臂(Cantilever)背面,并从微悬臂背面反射到由光电二极管构成的光斑位置检测器(Detector)。在样品扫描时,由于样品表面的原子与微悬臂探针尖端的原子间的相互作用力,微悬臂将随样品表面形貌而弯曲起伏,反射光束也将随之偏移,因而,通过光电二极管检测光斑位置的变化,就能获得被测样品表面形貌的信息。 在系统检测成像全过程中,探针和被测样品间的距离始终保持在纳米(10 -9 米)量级,距离太大不能获得样品表面的信息,距离太小会损伤探针和被测样品,反馈回路(Feedback)的作用就是在工作过程中,由探针得到探针-样品相互作用的强度,来改变加在样品扫描器垂直方向的电压,从而使样品伸缩,调节探针和被测样品间的距离,反过来控制探针-样品相互作用的强度,实现反馈控制。因此,反馈控制是本系统的核心工作机制。 本系统采用数字反馈控制回路,用户在控制软件的参数工具栏通过以参考电流、积分增益和比例增益几个参数的设置来对该反馈回路的特性进行控制。

































